


















MindCuber project


The MindCuber Project
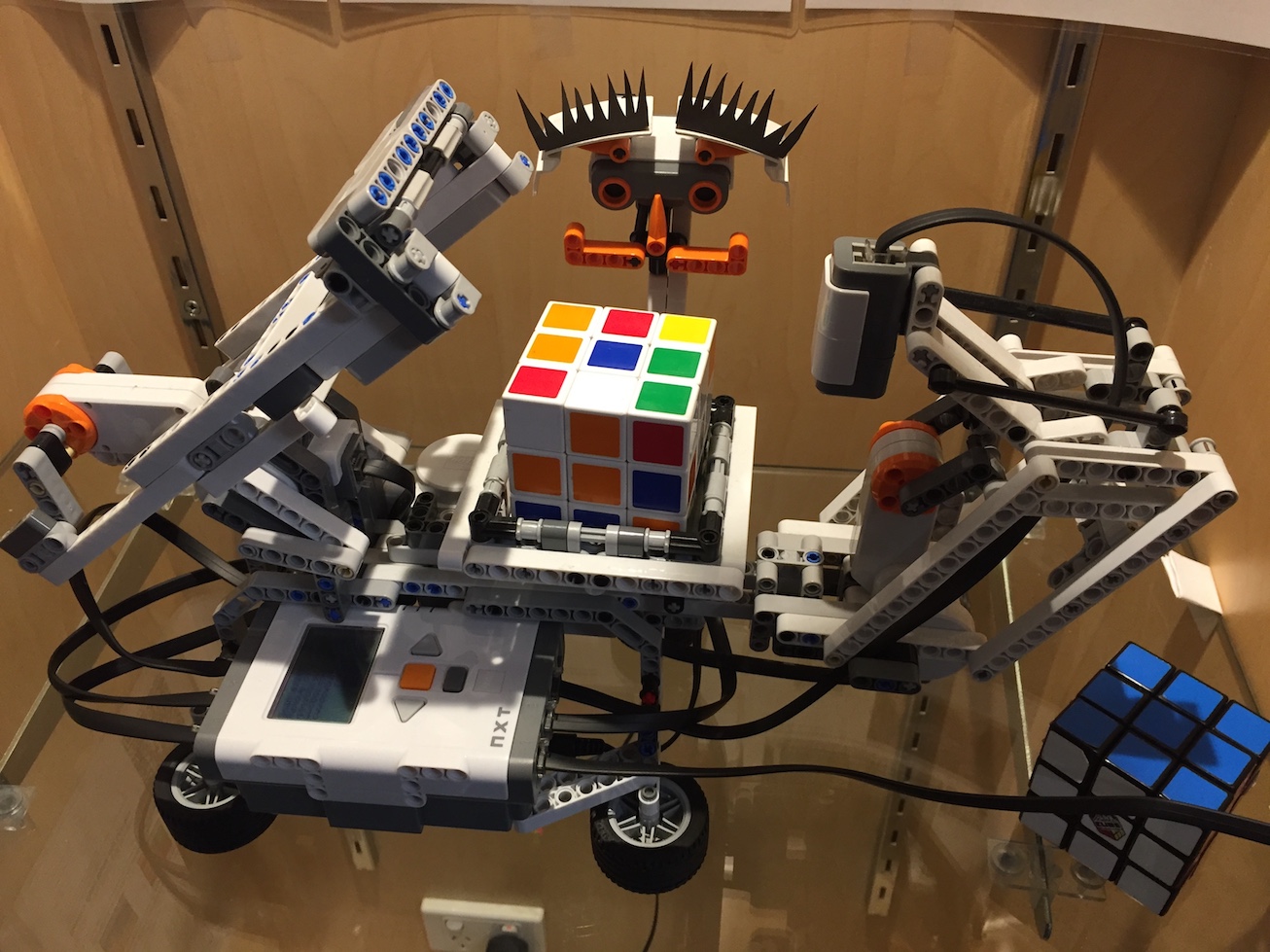
MindCuber, developed by David Gilday, is an early pioneer robot, which can solve a standard 3 x 3 x 3 Rubik cube. This robot is built using LEGO NXT or EV3. The mechanical design is elegant for a LEGO NXT 2.0 or 8527 set, and the programming (using NBC/NXC) is powerful and meeting the limited memory space in the NXT box. Have a look below in the video to see how it works and looks like. And if you have a LEGO NXT or EV3 set, you can follow the wonderful instructions provided at http://mindcuber.com/ to build your own robot Rubik Cube Solver ![]() . Thanks to David Gilday for this open source robot.
. Thanks to David Gilday for this open source robot.
Is it cool? I am lucky to have access to LEGO NXT set at my school, so I build one (I named it Emma) in 2014, and since then, it was shown to many students, borrowed by colleagues and friends to show and inspire more and more children and adults. (A 3D Rubik cube on the right for fun).
Because when someone borrows (for many days), quite often others will miss it. Therefore, I decided to put it in the display cabinet so everyone can see it always when they come to my building (S Block at Kelvin Grove Campus, QUT). But there is a problem when I do so. The MindCuber program is smart, but after it solves the cube, someone has to manually take it out, scramble and put it back again to solve. If I lock it in a display cabinet, no one can take it out, scramble and out it back to play again.
Therefore, I will need to modify the original program (MindCuber.nxc, avaialble at http://mindcuber.com). I have never learnt about NBC/NXC programming, but luckily, with the source code of MindCuber.nxc and online resources at http://bricxcc.sourceforge.net/nbc/, I am able to figuire out some modifications.
So, my idea is that I will attach a Touch Sensor to Port 1, and extend the touch sensor outside of the display cabinet for visitors to touch and play.


My design thinking goes like:
- The first time when the program starts, you put the scrambled cube for the robot to solve.
- The robot can then be put in and lock in the display cabinet with the touch sensor accessible from outside.
- With a press on the touch sensor, the robot will randomly scramble the cube, then solve it.
It seems to work well. And if you like to do the same, you can download my modified program below.
File: MindCuber.nxc

